・研究者たちは、ロボットを使い、2つの非常に異なる種類の生き物の間に架け橋をかけました。
・その橋は、両方のグループがそれぞれの力学を交換して、共有された決定に達することを可能にしたのです。
ロボット工学は生き物の行動を分析する上で重要なツールとなっています。近年、ロボットは、生き物が互いにコミュニケーションに使用する特定の信号を発し、それを発達させて特定の生き物のグループに入っていきました。
これらのロボットは単に生き物グループを観察することも、特定の生き物の行動に基づいて行動して、捕食者と被食者をシミュレートすることもできます。また、社会的交流に使用されるいくつかの信号をまねることによって、生き物のグループで社会的に交流することができています。
最近、スイス連邦工科大学の研究者は、2種類の生き物を特別なロボットの助けを借りて、コミュニケーションさせることができるかの実験を行いました。彼らは2つの動物群の間に架け橋を作ったのです。そして、力学の交換をして、共有された決定に達することをも可能にしたのです。
その方法は?
魚とミツバチは通常出会うことはなく、コミュニケーションする手段を持っていません。しかし、研究チームはこれらの非常に異なる種が、互いに情報を交換するようにしました:ロボットを通して可能にしたのです。
研究者たちはすでにひよこやゴキブリのグループで、「スパイ」ロボットのテストしました。2018年に、円形の水槽で魚の群れとロボットを1つ置きました。驚くべきことに、ロボットはすべての魚を一定の方向に泳がせることができたのです。
今回、研究者たちはその一歩先を行きました:研究室で魚とロボットのグループを蜂のグループと結びつけたのです。両群は、約430マイル離れていました。
ハチの群れが置かれたロボット端末は、温度変化、振動、そして空気の動きの形で信号を発するようにし、魚群の中のロボットは視覚的および行動的なシグナルを発するようにしました。視覚信号は縞、色、および形を説明し、行動信号は振動、加速度、および尾の動きに関する情報を伝えます。
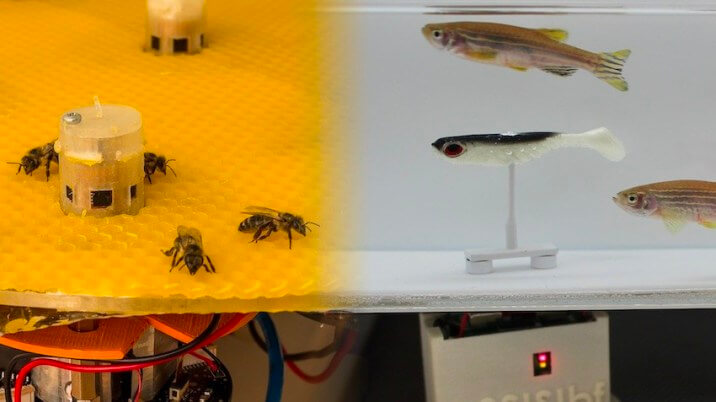
画像:研究者提供EPFL
両方のグループがこれらのシグナルに反応しました:ミツバチは特定の場所に群がり始め、魚は与えられた方向に泳ぎ始めたのです。ロボットは両方のグループの動態を捉え、互いにデータ交換をし、受け取ったデータを関連する種に適した信号に変換しました。
最初の25分間は、コミュニケーションは「無秩序」でしたが、その後両方のグループが同期した行動を示しました。別のグループの特性をいくつか行うようになったのです。魚は普段よりも群れで一緒に泳ぎ始め、ミツバチは落ち着きがなくなり、一緒に群がることが少なくなりました。
次は何でしょう?
異なる種のバイオハイブリッドグループにおける行動パターンを作成し、コントロールの実現への可能性を示しています。異なる種と多様なロボットシステムとの間のこのような繋がりは、動物の脳の知覚能力を用いた意思決定を改善することができるという、新しいタイプの人工集合知能への扉を開く可能性があります。
この研究は、自然の生息地をモニターするための技術開発に使用が可能です。例えば、花粉を運ぶ生き物を有機作物に向かわせたり、鳥が空港など危険がある場所を回避するようにしたりできるようになるでしょう。